Apprendre aux robots l’art de la précision humaine
Pendant des décennies, la robotique s’est appuyée sur des mécanismes de préhension simples et prédéterminés pour saisir et placer des objets en fonction d’attributs connus tels que la taille et la forme. Mais ces robots n’avaient pas la capacité de s’adapter à des environnements changeants et de gérer les erreurs en temps réel. Les progrès de l’intelligence artificielle leur ont permis d’apprendre à ramasser divers objets empilés de manière aléatoire, mais ils restent encore limités à des actions basiques et isolées de ramassage et de placement. Or, contrairement aux robots, les humains gèrent habilement plusieurs objets dans une seule main et peuvent naturellement coordonner des tâches avec les deux mains ou même avec un partenaire. Le projet SAHR, financé par l’UE, a cherché à surmonter ces limites et à doter les machines d’une dextérité semblable à celle des humains pour réaliser des tâches plus complexes et mieux coordonnées.
Tirer parti de l’art horloger
Dans un premier temps, les chercheurs se sont inspirés de l’horlogerie, un métier qui nécessite un contrôle précis et coordonné des deux mains. En étudiant des experts et des novices, ils ont exploré les choix de pose de la main dans des tâches bimanuelles de haute précision, révélant des différences clés entre les deux groupes. «Les experts privilégient les contraintes de la tâche, telles que la stabilisation de l’outil et l’application d’une force directionnelle, par rapport au confort de l’articulation. Inversement, les apprentis expérimentent différentes poses de mains et synergies de forces pour optimiser leurs performances», note Aude Billard, coordinatrice du projet. «Notre étude longitudinale sur l’apprentissage de l’horlogerie est révolutionnaire, car elle décrit le métier avec une précision sans précédent. Ces enregistrements uniques mettent en lumière les compétences complexes utilisées, mais servent également d’archives historiques vitales, préservant l’essence de l’horlogerie pour les générations futures, en particulier si cet artisanat venait à disparaître», ajoute Aude Billard.
Techniques avancées de manipulation et de navigation robotiques
Le projet a permis des avancées fondamentales dans le domaine de l’apprentissage automatique des robots en matière de manipulation. Les principaux développements comprennent des techniques innovantes permettant une transition en douceur entre différents types de mouvements, périodiques et non périodiques, et divers cycles limites, linéaires et non linéaires. Grâce à ces méthodes, les robots sont en mesure de réaliser des tâches complexes telles que le polissage de surfaces non planes (inégales) avec précision. En outre, l’équipe a introduit une technique qui combine la dynamique virtuelle avec des modèles de mouvement nominaux pour permettre le suivi d’une trajectoire précise. Cette méthode s’est avérée particulièrement utile pour des tâches telles que la découpe de matériaux souples. L’équipe du projet a également introduit une nouvelle méthode de regroupement spectral basée sur les graphes afin d’identifier automatiquement les différents modèles de mouvement et leurs points clés, connus sous le nom d’attracteurs. Elle consiste à créer des espaces clairs où chaque mouvement est réalisé de manière simple et linéaire. Ces travaux ont été étendus à la gestion de mouvements complexes et de haute dimension, améliorant ainsi la capacité des robots à apprendre et à effectuer diverses tâches de manipulation. Les chercheurs ont mis au point de nouvelles stratégies d’évitement des obstacles qui facilitent la gestion des environnements complexes et changeants. Contrairement à la planification traditionnelle, ces nouvelles approches utilisent des systèmes dynamiques pour fournir des solutions de forme close sans avoir besoin de replanifier. Ils assurent la sécurité, la stabilité et la convergence vers une cible, ainsi qu’une adaptabilité rapide à de nouveaux obstacles.
Des bras robotisés qui excellent dans les tâches complexes et précises
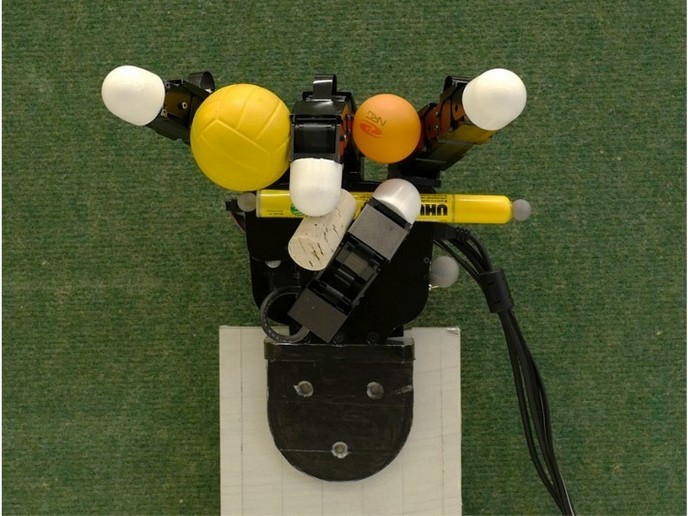
SAHR a permis de mieux comprendre la dextérité humaine et la manière de la reproduire dans les systèmes robotiques. En s’appuyant sur l’apprentissage automatique et le contrôle des robots, l’équipe a mis au point un cadre polyvalent applicable à divers problèmes de contrôle. La recherche a montré qu’il est possible de modéliser de nombreuses tâches de manipulation, des opérations à une main à la coordination bimanuelle complexe. «Nous avons démontré plusieurs applications de ces techniques de manipulation robotique qui permettent aux mains robotisées d’effectuer des tâches complexes. Il s’agit notamment de tenir plusieurs éléments, de faire tourner des objets de manière stable dans la main tout en évitant le contact avec d’autres objets et avec les doigts, de manipuler des pièces contenant des liquides et d’ajuster les forces de préhension en temps réel pour éviter l’instabilité», conclut Aude Billard.
Mots‑clés
SAHR, robots, horlogerie, apprentissage automatique, bimanuel, intelligence artificielle, dynamique virtuelle, dextérité humaine