Roboter erlernen die Kunst der menschlichen Präzision
Jahrzehntelang beruhte die Robotertechnik auf einfachen, vorgegebenen Greifmechanismen, um Objekte auf der Basis bekannter Eigenschaften wie Größe und Form aufzunehmen und zu platzieren. Diesen Robotern mangelte es an der Fähigkeit, sich an wechselnde Umgebungen anpassen und Fehler in Echtzeit beheben zu können. Dank der Fortschritte im Bereich der künstlichen Intelligenz sind Roboter in der Lage, verschiedene, zufällig gestapelte Objekte aufzunehmen, wobei jedoch immer noch die Beschränkung auf einfache, isolierte Einlege-und Entnahme-Aktionen besteht. Im Gegensatz zu Robotern können Menschen mehrere Objekte in einer Hand halten und Aufgaben auf natürliche Weise mit beiden Händen oder sogar mit einem Partner koordinieren. Im Rahmen des EU-finanzierten Projekts SAHR wurde versucht, diese Einschränkungen zu überwinden, wobei Robotern eine menschenähnliche Geschicklichkeit zur Ausführung komplexerer und koordinierter Aufgaben verliehen werden soll.
Kunst der Uhrenfabrikation nutzen
Ursprünglich ließen sich die Forschenden von der Uhrmacherei inspirieren, einem Handwerk, das eine präzise und koordinierte Steuerung beider Hände erfordert. Mithilfe von Untersuchungen mit Fachkräften und Neulingen erkundeten sie die Auswahl der Handhaltung bei hochpräzisen zweihändigen Aufgaben und stellten dabei wesentliche Unterschiede zwischen den beiden Gruppen fest. „Erfahrene Fachkräfte räumen Aufgabenanforderungen wie der Werkzeugstabilisierung und der gerichteten Kraftanwendung Vorrang gegenüber dem Gelenkkomfort ein. Umgekehrt experimentieren die Auszubildenden mit verschiedenen Handhaltungen und Kraftsynergien, um ihre Leistungsfähigkeit zu optimieren“, erklärt Projektkoordinatorin Aude Billard. „Unsere Längsschnittstudie über die Uhrmacherlehre ist bahnbrechend, wobei das Handwerk in bisher nie erreichter Detailtreue erfasst wird. Diese einzigartigen Aufnahmen veranschaulichen nicht nur die komplizierten Fertigkeiten, sondern dienen auch als wichtiges historisches Archiv, um die Essenz der Uhrenfabrikation für zukünftige Generationen zu bewahren, vor allem wenn dieses Handwerk einmal aussterben sollte“, fügt Billard hinzu.
Mit fortgeschrittenen Verfahren die robotische Manipulation und Navigation verbessern
Im Zuge des Projekts wurden grundlegende Fortschritte beim maschinellen Lernen in Bezug auf den Robotereinsatz erzielt. Zu den wichtigsten Entwicklungen zählen innovative Verfahren für den reibungslosen Übergang zwischen verschiedenen Arten von Bewegungen, d. h. periodischen und nichtperiodischen, und verschiedenen linearen und nichtlinearen Grenzzyklen. Mithilfe dieser Methoden können Roboter komplexe Aufgaben wie das präzise Polieren nicht planarer (unebener) Oberflächen erledigen. Zudem führte das Team ein Verfahren ein, bei dem virtuelle Dynamik mit nominalen Bewegungsmustern kombiniert wird, um einen Roboter in die Lage zu versetzen, einem präzisen Pfad zu folgen. Diese Methode erwies sich als besonders nützlich für Aufgaben wie etwa das Schneiden weicher Materialien. Das Projektteam führte außerdem ein neuartiges graphbasiertes spektrales Clustering-Verfahren ein, um automatisch verschiedene Bewegungsmuster und ihre Schlüsselpunkte, die sogenannten Attraktoren, zu identifizieren. Mit dieser Methode werden klare Räume geschaffen, in denen sich jede Bewegung auf einfache, lineare Weise verhält. Diese Arbeit wurde weiter ausgebaut, um komplexe, hochdimensionale Bewegungen zu meistern, wobei es gilt, die Fähigkeit der Roboter zum Erlernen und Ausführen verschiedener Manipulationsaufgaben zu verbessern. Die Forschenden haben neue Methoden zur Hindernisvermeidung entwickelt, die mit komplexen, sich verändernden Umgebungen umgehen können. Im Gegensatz zur traditionellen Bahnplanung werden bei diesen neuen Ansätzen dynamische Systeme genutzt, die Lösungen in geschlossener Form liefern, ohne dass eine Neuplanung erforderlich ist. Sie gewährleisten Sicherheit, Stabilität und Zielkonvergenz sowie schnelle Anpassungsfähigkeit bei Auftauchen neuer Hindernisse.
Präzise Roboterarme für komplexe Aufgaben
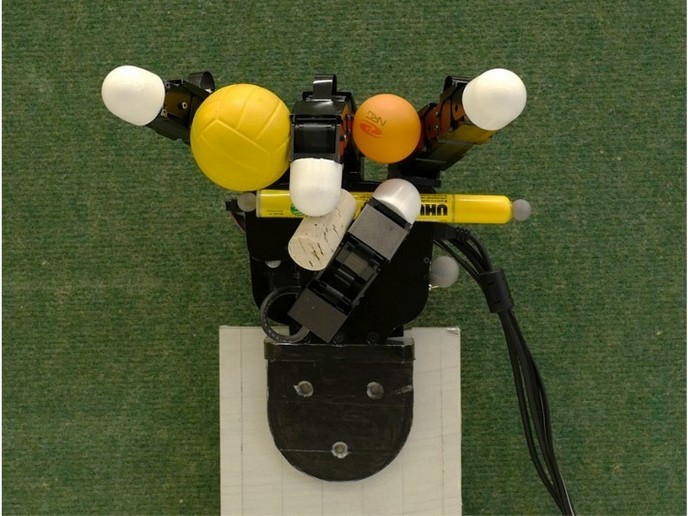
Das Team von SAHR erweiterte das Verständnis der menschlichen Geschicklichkeit und der Frage, wie diese in Robotersystemen nachgebildet werden kann. Mithilfe der Ausnutzung von maschinellem Lernen und Robotersteuerung hat das Team ein vielseitiges Rahmenwerk entwickelt, das auf verschiedene Steuerungsprobleme anwendbar ist. Die Forschung hat ergeben, dass zahlreiche Manipulationsaufgaben modelliert werden können, von einhändigen Operationen bis hin zu komplexer beidhändiger Koordination. „Wir haben mehrere Anwendungen dieser Robotermanipulationsverfahren demonstriert, mit denen Roboterhände komplexe Aufgaben ausführen können. Dazu zählen das Halten mehrerer Objekte, das stabile Drehen von Objekten in der Hand unter Vermeidung des Kontakts mit anderen Objekten und Fingern, die Handhabung von Objekten mit Flüssigkeiten und die Anpassung der Greifkräfte in Echtzeit, um Instabilität zu vermeiden“, fasst Billard zusammen.
Schlüsselbegriffe
SAHR, Roboter, Uhrenfabrikation, maschinelles Lernen, beidhändig, künstliche Intelligenz, virtuelle Dynamik, menschliche Geschicklichkeit