Robots learning the art of human precision
For decades, robotics relied on simple, predetermined gripping mechanisms to pick and place objects based on known attributes like size and shape. These robots lacked the ability to adapt to changing environments and handle errors in real time. Advances in artificial intelligence have enabled robots to pick up various objects stacked randomly, yet they are still limited to basic, isolated pick-and-place actions. Unlike robots, humans skilfully manage multiple objects in one hand and can naturally coordinate tasks with both hands or even with a partner. The EU-funded SAHR project sought to overcome these limitations, endowing robots with human-like dexterity for more complex and coordinated tasks.
Leveraging the art of watchmaking
Initially, researchers drew inspiration from watchmaking, a craft that requires precise and coordinated control of both hands. By studying experts and novices, they explored hand pose selection in high-precision bimanual tasks, revealing key differences between the two groups. “Experts prioritise task constraints such as tool stabilisation and directional force application over joint comfort. Conversely, apprentices experiment with various hand poses and force synergies to optimise their performance,” notes project coordinator Aude Billard. “Our longitudinal study of watchmaking apprenticeship is groundbreaking, capturing the craft in unprecedented detail. These unique recordings illuminate the intricate skills involved but also serve as a vital historical archive, preserving the essence of watchmaking for future generations, especially should this craft ever fade away,” adds Billard.
Advanced techniques elevating robotic manipulation and navigation
The project achieved fundamental advances in machine learning for robot manipulation. Key developments include innovative techniques for smoothly transitioning between different types of movements – periodic and non-periodic – and various linear and nonlinear limit cycles. These methods allowed robots to handle complex tasks like polishing non-planar (uneven) surfaces with precision. Furthermore, the team introduced a technique that combines virtual dynamics with nominal movement patterns to enable a robot to follow a precise path. This method was particularly useful for tasks like cutting soft materials. The project team also introduced a novel graph-based spectral clustering technique to automatically identify different movement patterns and their key points, known as attractors. This method creates clear spaces where each movement behaves in a simple, linear way. This work was further extended to handle complex, high-dimensional movements, enhancing the ability of robots to learn and perform various manipulation tasks. Researchers have developed new methods for obstacle avoidance that handle complex, changing environments. Unlike traditional path planning, these new approaches use dynamic systems to provide closed-form solutions without needing to replan. They ensure safety, stability and convergence to a target, along with quick adaptability to new obstacles.
Robotic arms excelling in complex, precise tasks
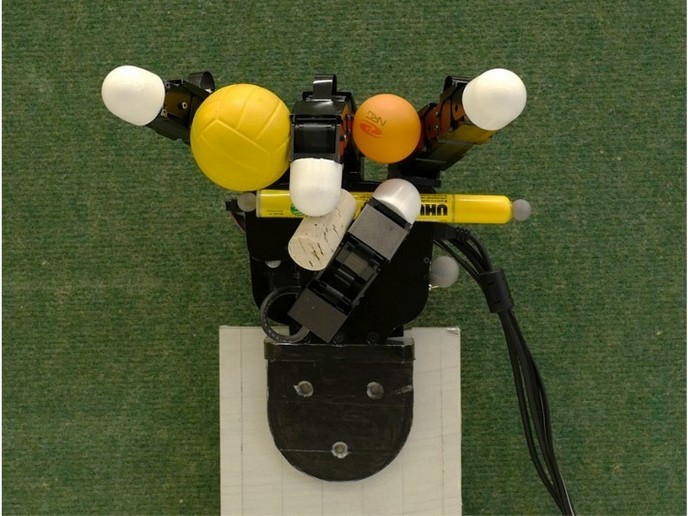
SAHR advanced understanding of human dexterity and how to replicate it in robotic systems. By leveraging machine learning and robot control, the team developed a versatile framework applicable to various control problems. The research demonstrated the ability to model numerous manipulation tasks, from single-hand operations to complex bimanual coordination. “We demonstrated several applications of these robotic manipulation techniques that enable robotic hands to perform complex tasks. These include holding multiple objects, rotating objects stably in hand while avoiding contact with other objects and fingers, handling objects with liquids, and adjusting grasping forces in real-time to prevent instability,” concludes Billard.
Keywords
SAHR, robots, watchmaking, machine learning, bimanual, artificial intelligence, virtual dynamics, human dexterity