Insegnare ai robot l’arte della precisione umana
Al fine di afferrare e posizionare gli oggetti sulla base di specifici attributi noti, come dimensioni e forma, per decenni la robotica si è affidata a semplici meccanismi di presa predeterminati; i robot che si affidavano a tali processi, tuttavia, non disponevano della capacità di adattarsi ad ambienti mutevoli e di gestire gli errori in tempo reale. I progressi compiuti nel settore dell’intelligenza artificiale hanno permesso ai robot di raccogliere vari oggetti impilati in modo casuale; ciononostante, i compiti di raccolta e posizionamento che effettuano si limitano tuttora ad azioni isolate e basilari. A differenza dei robot, gli esseri umani sono in grado di gestire abilmente più oggetti servendosi di una sola mano e riescono a coordinare in maniera naturale le attività da svolgere con entrambe le mani, o addirittura con un partner. Il progetto SAHR, finanziato dall’UE, si è prefisso di superare queste limitazioni dotando i robot di una destrezza simile a quella umana, in modo da consentire loro di effettuare compiti più complessi e coordinati.
Sfruttare l’arte dell’orologeria
I ricercatori si sono in primo luogo ispirati all’orologeria, un mestiere che richiede un controllo preciso e coordinato di entrambe le mani. Prendendo in esame esperti e principianti, gli studiosi hanno esplorato la selezione della posa della mano in compiti di alta precisione svolti con tutte e due, rivelando alcune differenze chiave tra i due gruppi oggetto di studio. «Mentre gli esperti danno priorità ai vincoli presenti nei diversi compiti, come la stabilizzazione dell’utensile e l’applicazione della forza direzionale, piuttosto che al comfort per le articolazioni, gli apprendisti sperimentano varie pose delle mani e sinergie di forza per ottimizzare le proprie prestazioni», osserva Aude Billard, la coordinatrice del progetto. «Il nostro innovativo studio longitudinale sull’apprendistato nel campo dell’orologeria consente di acquisire i dettagli del mestiere con una precisione senza precedenti. Queste registrazioni uniche non chiariscono solamente le intricate abilità coinvolte, ma fungono anche da archivio storico vitale preservando l’essenza dell’orologeria per le generazioni future, soprattutto nel caso in cui questo mestiere dovesse scomparire», aggiunge Billard.
Tecniche avanzate per migliorare la manipolazione e la navigazione robotica
Il progetto ha compiuti progressi fondamentali nel campo dell’apprendimento automatico per la manipolazione dei robot. Tra gli sviluppi principali figura lo sviluppo di tecniche innovative per una transizione fluida tra diversi tipi di movimenti (periodici e non) e vari cicli limite lineari e non lineari, metodi che hanno permesso ai robot di gestire con precisione compiti complessi come la lucidatura di superfici non piane (irregolari). Inoltre, il team ha introdotto una tecnica che combina dinamiche virtuali con modelli di movimento nominali allo scopo di consentire ai robot di seguire un percorso preciso, il che si è rivelato particolarmente utile per attività come il taglio di materiali morbidi. Il team del progetto ha inoltre introdotto una nuova tecnica di clustering spettrale basata su grafi per identificare automaticamente diversi modelli di movimento e i loro punti chiave, noti come attrattori; si tratta di un metodo che permette di creare spazi chiari, in cui ogni movimento opera in modo semplice e lineare. Questo lavoro è stato ulteriormente ampliato al fine di gestire complessi movimenti a elevata dimensionalità, migliorando la capacità dei robot di apprendere ed eseguire vari compiti di manipolazione. I ricercatori hanno sviluppato nuovi metodi per evitare gli ostacoli, adattabili ad ambienti complessi e mutevoli. A differenza della tradizionale pianificazione dei percorsi, questi nuovi approcci utilizzano sistemi dinamici per fornire soluzioni a forma chiusa senza necessità di ripianificazione. Essi garantiscono sicurezza, stabilità e convergenza verso un obiettivo, oltre ad assicurare una rapida adattabilità ai nuovi ostacoli.
Bracci robotici con prestazioni eccellenti in compiti complessi e precisi
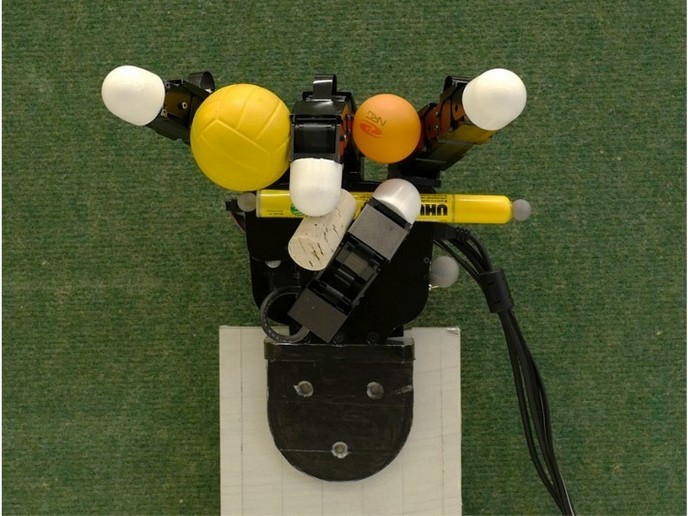
SAHR ha permesso di incrementare la comprensione della destrezza umana e delle modalità con cui replicarla nei sistemi robotici. Sfruttando l’apprendimento automatico e il controllo dei robot, il team ha sviluppato una struttura versatile che risulta applicabile a vari problemi di controllo. La ricerca ha dimostrato la capacità di modellare numerosi compiti di manipolazione, dalle operazioni con una sola mano a quelle più complesse, effettuate con entrambe. «Abbiamo dimostrato diverse applicazioni di queste tecniche di manipolazione robotica che consentono alle mani dei robot di eseguire compiti complessi, tra cui afferrare più oggetti, ruotarli in maniera stabile nella mano evitando il contatto con altri oggetti e con le dita, manipolare oggetti contenenti liquidi e regolare le forze di presa in tempo reale per evitare l’instabilità», conclude Billard.
Parole chiave
SAHR, robot, orologeria, apprendimento automatico, due mani, intelligenza artificiale, dinamica virtuale, destrezza umana