Roboty zgłębiają tajniki precyzji na poziomie ludzi
Przez wiele dziesięcioleci robotycy wykorzystywali proste i doskonale opisane mechanizmy chwytające w celu podnoszenia, przenoszenia i odkładania przedmiotów w ustalonych miejscach na podstawie ich cech charakterystycznych, takich jak rozmiar i kształt. Jednym z ograniczeń tych robotów był brak możliwości przystosowania do zmiennego otoczenia i obsługi błędów w czasie rzeczywistym. Rozwój technologii sztucznej inteligencji doprowadził do sytuacji, w której roboty są w stanie wybierać i podnosić przedmioty ułożone w losowym porządku, jednak ich funkcje są ograniczone do podstawowych i pojedynczych zadań, na przykład wyboru elementu i umieszczenia go w zadanym miejscu. W przeciwieństwie do robotów, ludzie doskonale radzą sobie z trzymaniem wielu przedmiotów w jednej dłoni, mogą także koordynować prace wykonywane oburącz, a nawet we współpracy z drugą osobą. Zespół finansowanego ze środków Unii Europejskiej projektu SAHR miał na celu rozwiązanie problemów związanych z tymi ograniczeniami i opracowanie robotów o zręczności porównywalnej z ludzką, aby umożliwić im wykonywanie bardziej złożonych i skoordynowanych zadań.
Umiejętności zegarmistrzów w robotyce
Pierwszym źródłem inspiracji dla badaczy było zegarmistrzostwo - rzemiosło wymagające precyzyjnych i skoordynowanych ruchów obu rąk. Analizując sposób pracy doświadczonych ekspertów i nowicjuszy, badacze przeanalizowali układ rąk i dłoni podczas wykonywania zadań wymagających precyzji i koordynacji obu rąk. Badania ujawniły istotne różnice pomiędzy obiema grupami. „W przypadku doświadczonych ekspertów zaobserwowaliśmy, że uznają stabilizację narzędzi czy kierunkowe przyłożenie siły związane z wykonywanym zadaniem za bardziej istotną niż wygodę stawów. Nowicjusze z kolei próbują różne ustawienia rąk oraz punkty przyłożenia sił, aby zoptymalizować wykonywane prace”, zauważa Aude Billard, koordynatorka projektu. „Przeprowadzone przez nasz zespół przekrojowe badanie pracy zegarmistrzów stanowi prawdziwy przełom, pozwoliło bowiem na obserwację rzemieślników przy pracy z niespotykaną dotąd dokładnością. Na wyjątkowych nagraniach widzimy rzemieślników wykonujących złożone zadania, a same nagrania stanowią istotne archiwum materiałów historycznych, dzięki którym informacje na temat rzemiosła będą dostępne dla przyszłych pokoleń, zwłaszcza jeśli dojdzie do jego zaniknięcia”, dodaje Billard.
Zaawansowane techniki usprawniające nawigację i pracę z przedmiotami
Jednym z kluczowych rezultatów projektu był rozwój przełomowych technik uczenia maszynowego wykorzystywanych przez roboty w celu sprawniejszej pracy z przedmiotami. Kluczowe osiągnięcia obejmują innowacyjne techniki płynnego przechodzenia między różnymi rodzajami ruchów (okresowych i nieokresowych), a także różnymi liniowymi i nieliniowymi cyklami granicznymi. Dzięki wykorzystaniu tych metod roboty są obecnie w stanie precyzyjnie wykonywać złożone zadania, takie jak polerowanie niepłaskich (nierównych) powierzchni. Co więcej, zespół opracował technikę, która łączy wirtualną dynamikę z modelami ruchu, aby umożliwić robotowi podążanie precyzyjną ścieżką. Metoda ta była szczególnie przydatna w przypadku realizacji zadań takich jak cięcie miękkich materiałów. Zespół opracował również nowatorską technikę klastrowania spektralnego opartą na grafach, aby automatycznie identyfikować różne modele ruchu i ich kluczowe punkty - atraktory. Rezultatem są wyraźne przestrzenie, w których każdy ruch jest opisany w prosty, liniowy sposób. Dalsze prace umożliwiły rozszerzenie możliwości o obsługę złożonych, wielowymiarowych ruchów, zwiększając zdolność robotów do uczenia się i wykonywania różnych zadań związanych z manipulacją przedmiotami. Badacze opracowali nowe algorytmy unikania przeszkód, które pozwalają na poruszanie się w złożonych i zmiennych środowiskach. W przeciwieństwie do tradycyjnego planowania ścieżek, nowe metody wykorzystują układy dynamiczne, których skutkiem jest zamknięte rozwiązanie, które nie wymaga ponownego planowania. Dzięki temu możliwe jest zapewnienie bezpieczeństwa, stabilności i jasnej drogi do celu, a także możliwości szybkiego dostosowania zachowania w przypadku pojawienia się nowych przeszkód.
Ramiona robotyczne wykonują precyzyjne i złożone prace
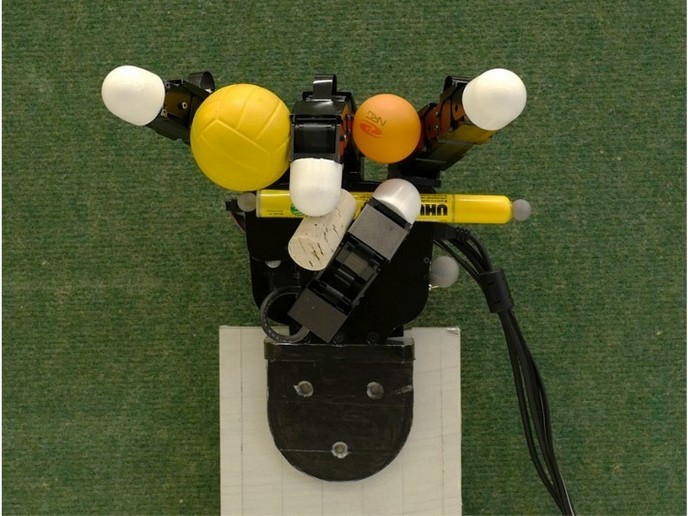
Zespół projektu SAHR skupił się na badaniach ludzkiej zręczności i opracowaniu sposobu odtworzenia ludzkich zachowań przy pomocy robotów. Wykorzystując uczenie maszynowe i systemy sterowania, badacze opracowali uniwersalne ramy, które mogą zostać dostosowane do różnych scenariuszy związanych ze sterowaniem. Skutkiem badań jest możliwość modelowania zróżnicowanych zadań związanych z przedmiotami wymagających używania jednej lub obu rąk. „Przedstawiliśmy szereg zastosowań technik, dzięki którym zrobotyzowane dłonie są w stanie wykonywać złożone zadania. Wśród nich możemy wymienić trzymanie wielu przedmiotów, stabilne obracanie przedmiotów w dłoni bez kontaktu z pozostałymi przedmiotami i palcami, przenoszenie naczyń wypełnionych płynami oraz zmiany siły chwytu w czasie rzeczywistym, aby uniknąć utraty stabilności”, podsumowuje Billard.
Słowa kluczowe
SAHR, roboty, zegarmistrzostwo, uczenie maszynowe, oburęczne, sztuczna inteligencja, wirtualna dynamika, ludzka zręczność