

Robots que aprenden el arte de la precisión humana
Durante décadas, la robótica se ha basado en mecanismos de agarre sencillos y predeterminados para coger y colocar objetos en función de los atributos conocidos como el tamaño y la forma. Estos robots carecían de la capacidad para adaptarse a entornos cambiantes y gestionar errores en tiempo real. Los avances en inteligencia artificial han permitido a los robots recoger diversos objetos apilados al azar, pero siguen limitados a acciones básicas y aisladas de coger e insertar. A diferencia de los robots, los humanos manejan con habilidad múltiples objetos en una mano y pueden coordinar tareas de forma natural con ambas manos o incluso con un compañero. El equipo del proyecto SAHR, financiado con fondos europeos, pretendía superar estas limitaciones dotando a los robots de una destreza similar a la humana para realizar tareas más complejas y coordinadas.
Aprovechar el arte de la relojería
Al principio, los investigadores se inspiraron en la relojería, un arte que requiere un control preciso y coordinado de ambas manos. Mediante el estudio de expertos y novatos, exploraron la selección de la pose de la mano en tareas bimanuales de alta precisión, lo que reveló diferencias clave entre ambos grupos. «Los expertos dan prioridad a las limitaciones de la tarea, como la estabilización de la herramienta y la aplicación direccional de la fuerza, frente a la comodidad de la articulación. A la inversa, los aprendices experimentan con diversas posturas de la mano y sinergias de fuerza para optimizar su rendimiento», señala la coordinadora del proyecto, Aude Billard. «Nuestro estudio longitudinal del aprendizaje de la relojería es pionero y capta el oficio con un detalle sin precedentes. Estas grabaciones únicas ponen de manifiesto la complejidad de los procesos, pero también constituyen un archivo histórico vital que preserva la esencia de la relojería para las generaciones futuras, especialmente en el caso de que este arte llegue a desaparecer», añade Billard.
Técnicas avanzadas que impulsan la manipulación y navegación robóticas
En el proyecto se lograron avances fundamentales en el aprendizaje automático para la manipulación de los robots. Entre los principales avances cabe citar las técnicas innovadoras de transición suave entre los distintos tipos de movimientos -periódicos y no periódicos, y diversos ciclos límite lineales y no lineales. Con estos métodos los robots pudieron realizar con precisión tareas complejas como el pulido de superficies no planas (irregulares). Además, el equipo presentó una técnica que combina la dinámica virtual con patrones de movimiento nominales para que un robot pueda seguir una trayectoria precisa. Este método resultó especialmente útil para tareas como el corte de materiales blandos. El equipo del proyecto también presentó una técnica de agrupación espectral novedosa basada en gráficos para identificar automáticamente distintos patrones de movimiento y sus puntos clave, conocidos como atractores. Con este método se crean espacios claros en los que cada movimiento se comporta de forma sencilla y lineal. Este trabajo se amplió posteriormente para manejar movimientos complejos y de alta dimensión, lo que mejora la capacidad de los robots para aprender y realizar diversas tareas de manipulación. Los investigadores han desarrollado métodos nuevos para evitar obstáculos en entornos complejos y cambiantes. A diferencia de la planificación de las vías tradicional, estos métodos nuevos utilizan sistemas dinámicos para proporcionar soluciones de forma cerrada sin necesidad de volver a planificar. Garantizan seguridad, estabilidad y convergencia hacia un objetivo, junto con una rápida adaptabilidad a los obstáculos nuevos.
Brazos robóticos que sobresalen en tareas complejas y precisas
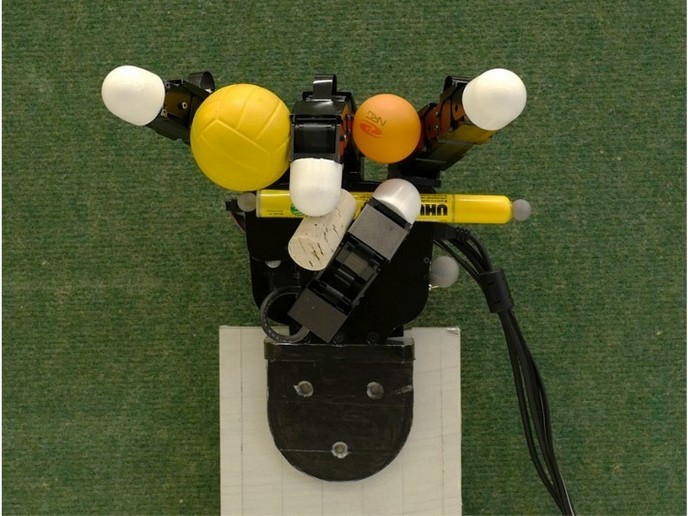
En SAHR se avanzó en la comprensión de la destreza humana y en cómo replicarla en sistemas robóticos. Aprovechando el aprendizaje automático y el control de robots, el equipo desarrolló un marco versátil aplicable a diferentes problemas de control. En la investigación se demostró la capacidad de modelar numerosas tareas de manipulación, desde operaciones con una sola mano hasta coordinaciones complejas con dos manos. «Demostramos varias aplicaciones de estas técnicas de manipulación robótica que permiten a las manos robóticas realizar tareas complejas. Por ejemplo, sujetar varios objetos, girar objetos de forma estable en la mano evitando el contacto con otros objetos y dedos, manipular objetos con líquidos y ajustar las fuerzas de agarre en tiempo real para evitar la inestabilidad», concluye Billard.
Palabras clave
SAHR, robots, relojería, aprendizaje automático, bimanual, inteligencia artificial, dinámica virtual, destreza humana