

SCRATCHBOT al rescate
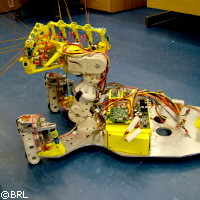
Un equipo británico de investigadores ha diseñado un robot capaz de utilizar las vibrisas tal y como lo hacen las ratas para explorar su entorno. El proyecto SCRATCHBOT («Cognición y representación espacial mediante tacto activo») es una iniciativa innovadora del Laboratorio de Robótica de Bristol (BRL) y la Universidad de Sheffield (Reino Unido) que forma parte del proyecto comunitario ICEA («Integración de la cognición, la emoción y la autonomía»), financiado con 6 millones de euros mediante el área temática «Tecnologías de la Sociedad de la Información» (TSI) del Sexto Programa Marco (6PM) ICEA, cuya conclusión está prevista para diciembre de 2009, se dedica al desarrollo de sistemas de inteligencia artificial inspirados en paradigmas biológicos. Gracias a sus características innovadoras, SCRATCHBOT ha sido incluido en la lista de las mejores innovaciones del año «Best of What's New» realizada por la revista Popular Science. SCRATCHBOT posee dieciocho vibrisas (o bigotes) de plástico que, gracias a un movimiento de vaivén con una cadencia de cinco veces por segundo, le permiten navegar por un entorno. Este robot semejante a una rata ha sido desarrollado por el BRL, una asociación compuesta por la Universidad del Oeste de Inglaterra, la Universidad de Bristol y el «Laboratorio de Tacto Activo» de la Universidad de Sheffield. «Durante mucho tiempo, la visión ha sido la modalidad sensorial biológica más estudiada por los científicos», indicó el Dr. Tony Pipe del BRL. «Pero la detección activa por el tacto reviste gran interés para quienes estudiamos sistemas biológicos que podrían aplicarse en robótica. Ciertos sistemas sensoriales como los bigotes de las ratas ofrecen ventajas particulares en este ámbito», añadió. «Los sensores táctiles de los seres humanos, que se encuentran en las yemas de los dedos, son más vulnerables a padecer daños y lesiones que los bigotes. Las ratas tienen la capacidad de valerse de sus bigotes aunque estos estén dañados. Si los "bigotes" de un robot se rompieran, sería fácil reemplazarlos sin que ello afectara a la totalidad del robot ni a sus costosos sistemas de ingeniería. Con esta mención se reconoce que nuestra investigación constituye un salto tecnológico en este ámbito.» La capacidad de los animales para servirse del tacto inspiró a los investigadores para desarrollar esta nueva tecnología. Las ratas, por ejemplo, son capaces de determinar con exactitud la posición, forma y textura de los objetos gracias a sus vibrisas. Además son capaces de tomar decisiones rápidas y precisas con relación a objetos y, a continuación, utilizan dicha información para formar mapas mentales. Cuando una de las vibrisas del SCRATCHBOT se dobla al contacto con un objeto, un sensor situado en la base de la misma manda una señal a un programa informático para que el robot gire hacia el objeto. Las vibrisas más próximas a un objeto se mueven menos, mientras que las más alejadas efectúan movimientos de barrido más amplios para determinar el contorno del mismo. «A principios de año celebramos un seminario en la Universidad de Sheffield para mostrar la características únicas del SCRATCHBOT. Allí expusimos la orientación de nuestra investigación en el desarrollo de sensores semejantes a vibrisas controlados de forma activa para su aplicación a máquinas inteligentes», afirmó el profesor Tony Prescott de la Universidad de Sheffield. «Si bien ya existen robots dotados de sensores táctiles, hasta ahora no se había usado el tacto como sistema sensor principal. Con el desarrollo de estos robots biomiméticos, no estamos meramente diseñando dispositivos novedosos con detección táctil, sino que también contribuimos a comprender los aspectos biológicos de este tipo de detección.» La nueva tecnología puede ser útil para ayudar a gente en situaciones de peligro como, por ejemplo, trabajadores atrapados por el derrumbamiento de una mina. «La tecnología de vibrisas puede utilizarse para percibir objetos y maniobrar en un entorno complicado», apuntó el Dr. Pipe. «En una habitación llena de humo, por ejemplo, un robot con estas características podría ayudar en una operación de rescate localizando a los supervivientes de un incendio.»