

Nowe technologie i narzędzia zwiększają skuteczność miejskich operacji poszukiwawczo-ratowniczych
Sytuacje nadzwyczajne, takie jak klęski żywiołowe czy ataki terrorystyczne, a nawet incydenty, które potencjalnie mogą z czasem przybrać poważniejszy charakter, skutkują często uszkodzeniem infrastruktury, obrażeniami ciała lub utratą życia ludzi, a czasami uwięzieniem niektórych osób pod gruzami. Zespoły USAR muszą natychmiast spieszyć z akcją ratunkową, by ocalić życie osób uwięzionych pod gruzami, a także by móc ewakuować pozostałą ludność. Statystyki pokazują, że wydajna technologia USAR może zmniejszyć straty spowodowane wypadkami do 9 %. Konsorcjum INACHUS, zrzeszającemu 20 partnerów, udało się opracować scentralizowaną platformę, która zapewnia świadomość sytuacyjną na dużych obszarach, a tym samym usprawnia wykrywanie i lokalizowanie uwięzionych ofiar. Platforma jest wspomagana przez narzędzia symulacyjne, które pozwalają zespołom USAR przewidywać wady konstrukcyjne, a także przez kompleksowy mechanizm wspomagania decyzji, który uwzględnia procedury operacyjne i zasoby odpowiednich podmiotów. „Metodologia INACHUS jest w najwyższym stopniu zorientowana na użytkownika. Opierając się na spostrzeżeniach i potrzebach użytkowników końcowych, zespół INACHUS starannie zaprojektował i przetestował zintegrowaną platformę, która zapewnia odpowiednie narzędzia dla służb interwencyjnych i zespołów USAR w celu skutecznego i szybkiego reagowania na różne zdarzenia nadzwyczajne”, wyjaśnia kierownik projektu Evangelos Sdongos.
„Robowęże” pełzną na ratunek
Opracowany w ramach projektu INACHUS prototypowy robot inspirowany budową węża został zaprojektowany specjalnie na potrzeby zespołów ratowniczych, aby im pomóc w poszukiwaniu osób znajdujących się w zawalonych budynkach oraz w komunikacji z nimi. Operator może zdalnie sterować robotem i prowadzić go wąskimi szczelinami gruzowiska. Robot wykrywa obecność człowieka za pomocą zamontowanego czujnika radarowego, elektronicznego nosa (który wykrywa również niebezpieczne gazy) i kamery na podczerwień. Wbudowany dwukierunkowy system komunikacji audio automatycznie śledzi swoją pozycję w oparciu o system lokalizacji w czasie rzeczywistym, umożliwiając zespołowi ratowniczemu łączność z poszkodowanymi znajdującymi się pod gruzami. Prototyp robota jest wyposażony w obudowę, która mieści zasilacz, komputer klasy przemysłowej i niezbędne urządzenia komunikacyjne. Jest ona przymocowana do robota za pomocą kabla zasilającego i komunikacyjnego.
Czujniki wewnątrz i wokół miejsca zdarzenia
Urządzenie RobotRadar, czyli zminiaturyzowany system radarowy, to jeden z kilku czujników zintegrowanych z robowężem. Robot może wpełznąć pod gruz i zbliżyć się do uwięzionych w środku osób, zwiększając dzięki temu szanse na znalezienie i uratowanie poszkodowanych znajdujących się głęboko pod rumowiskiem. Kolejnym, podobnym narzędziem jest naziemny system czujników sejsmicznych wykrywający i lokalizujący miejsca, z których dobywa się odgłos stukania będącego sygnałem, że pod gruzem znajdują się ludzie.
Narzędzia do podejmowania decyzji i wizualizacji
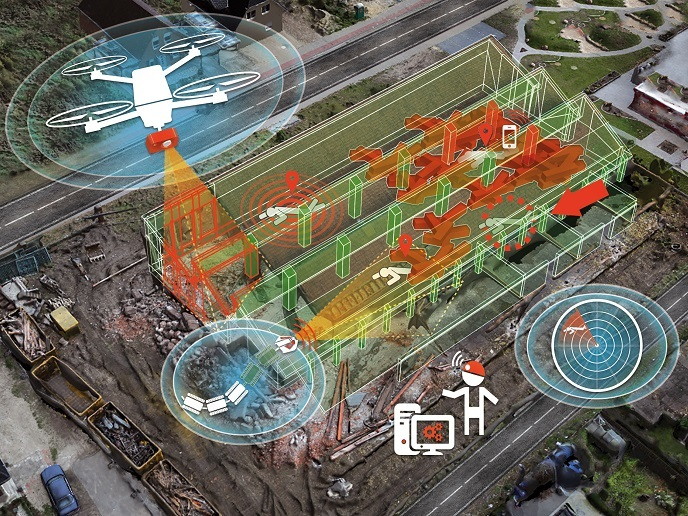
Opracowane przez zespół INACHUS narzędzia do modelowania pomagają zespołom ratowniczym zrozumieć i ocenić stan zawalonych konstrukcji, tak aby mogły odpowiednio zaplanować swoje interwencje. Dane z modelowania są uzupełniane i rozszerzane o usługi z powietrza: urządzenia powietrzne, takie jak mniejsze i większe systemy bezzałogowych statków powietrznych, gromadzą dane wizualne, termiczne i laserowe przedstawiane w postaci chmury punktów. Oferują one zespołom USAR bogaty zestaw informacji dotyczących gruzu, szczelin lub niebezpiecznych lokalizacji.
Połączony obraz sytuacji operacyjnej
Wszystkie wcześniej zgromadzone dane są przekazywane do platformy połączonego obrazu sytuacji operacyjnej za pomocą odpornego systemu komunikacji ad hoc, co w efekcie zapewnia kompleksowy widok miejsca zdarzenia w formie mapy. Bogate możliwości wizualizacji 3D powinny zwiększyć ogólną świadomość sytuacyjną i pomóc zespołom ratowniczym w podejmowaniu decyzji na poziomie strategicznym, taktycznym i operacyjnym.
Słowa kluczowe
INACHUS, poszukiwawczo-ratownicza, działania operacyjne na miejscu zdarzenia, zarządzanie kryzysowe, reagowanie w przypadku katastrof, służby interwencyjne, robotyka, systemy komunikacji w sytuacjach nadzwyczajnych, połączony obraz sytuacji operacyjnej, czujniki, ocena stanu konstrukcji, teledetekcja



