

New technology and tools to improve urban search and rescue operations
Emergency situations such as natural disasters and terrorist attacks, or even incidents that have the potential to become more serious – can damage infrastructure, cause injury or loss of life, and trap people in debris. An immediate life-saving response by USAR teams is required to rescue those who are trapped and evacuate survivors. Statistics show that an efficient USAR technology can reduce accident losses to 9 %. Composed of 20 partners, the INACHUS consortium succeeded in developing a holistic platform that provides wide-area situational awareness, thereby enhancing the detection and localisation of trapped victims. The platform is assisted by simulation tools that allow USAR teams to predict structural failures and a holistic decision support mechanism that incorporates operational procedures and resources of relevant actors. “The INACHUS methodology is as user-centric as possible: Based on end-user insights and needs, INACHUS carefully designed and evaluated an integrated platform that provides the appropriate tools to first responders and USAR teams to effectively and quickly respond to various emergency events,” notes project manager Evangelos Sdongos.
Snake robots crawling to the rescue
The INACHUS robot is a snake-like robot prototype designed to aid rescue teams in finding and communicating with victims under a collapsed building. An operator can remotely control the robot and drive it under the rubble by entering very small openings. The robot detects human presence through a mounted radar sensor, an electronic nose (which also detects dangerous gases) and an infrared camera. Automatically tracking its position based on a real-time locating system, an embedded two-way audio communication system allows the rescue team to communicate with the victims under the rubble. The robot prototype comes with a case containing the power supply, an industrial grade PC and the necessary communication devices. The case is tethered to the robot via a power and communication cable.
Sensors in and around the worksite
The RobotRadar is a miniaturised radar system, one of several sensors integrated in the snake robot. The robot can crawl into the rubble and get closer to the trapped victims, increasing the chance to find deeply buried humans and save more lives. Another similar tool is the ground-based seismic sensor system that detects and locates knocking signals from victims trapped in debris heaps.
Decision-making and visualisation tools
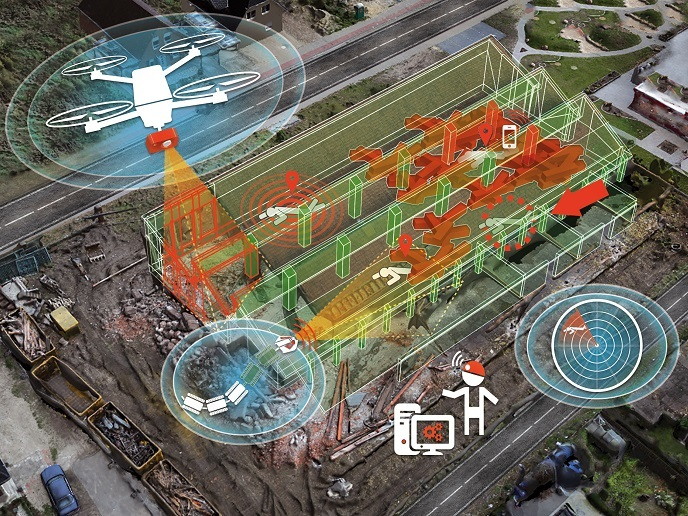
The INACHUS modelling tools assist emergency teams to understand and assess the integrity of collapsed structures so that they can appropriately plan their interventions. Modelling data are complemented and augmented with airborne services: Airborne equipment such as small and large unmanned aerial vehicle systems gather visual, thermal and laser data which are represented by point clouds. These offer a rich set of information to the USAR concerning debris, openings, or dangerous locations.
The common operational picture
All previous data are conveyed to the common operational picture platform through a resilient, ad hoc communication system which provides a comprehensive map-centric view on the site of an incident. Its rich 3D visualisation capabilities should increase the overall situational awareness and aid rescue teams in the decision-making process on strategic as well as tactic and operational levels.
Keywords
INACHUS, search and rescue, worksite operations, crisis management, disaster response, first responders, robotics, emergency communications, common operational picture, sensors, structural assessment, remote sensing



