

De nouveaux outils et de nouvelles technologies améliorent les opérations de recherche et de sauvetage en milieu urbain
Les situations d’urgence, comme les catastrophes naturelles et les attaques terroristes, ou encore les incidents risquant de s’aggraver, peuvent endommager les infrastructures, causer des blessures voire la mort et emprisonner les gens sous des décombres. Afin de porter secours aux victimes prises au piège et d’évacuer les survivants, il est impératif que les équipes de RSMU puissent intervenir immédiatement. Les statistiques montrent qu’une technologie de RSMU efficace permet de réduire à 9 % les pertes résultant d’accidents. Composé de 20 partenaires, le consortium INACHUS est parvenu à mettre au point une plateforme globale qui fournit une appréciation générale de la situation, améliorant ainsi la détection et la localisation des victimes prises au piège. La plateforme est assistée par des outils de simulation qui permettent aux équipes de RSMU d’anticiper les défaillances structurelles et intègre un mécanisme global d’aide à la décision qui tient compte des procédures opérationnelles et des ressources des acteurs concernés. «La méthodologie INACHUS est centrée le plus possible sur l’utilisateur: sur la base des connaissances et des besoins des utilisateurs finaux, INACHUS a soigneusement conçu et évalué une plateforme intégrée qui fournit les outils appropriés aux services d’intervention immédiate et aux équipes de RSMU pour répondre efficacement et rapidement à différentes situations d’urgence», fait remarquer Evangelos Sdongos, gestionnaire du projet.
Des robots serpents glissent à la rescousse
Le robot INACHUS est un prototype de robot-serpent, conçu pour aider les équipes de sauvetage à retrouver les victimes emprisonnées sous les décombres et à communiquer avec elles. Un opérateur peut commander le robot à distance et le faire pénétrer sous les décombres par de très petits orifices. Le robot détecte la présence d’un être humain grâce à un capteur radar embarqué, à son nez électronique (qui détecte également les gaz dangereux) et à une caméra infrarouge. Un système de communication audio bidirectionnel intégré assure un suivi automatique de sa position grâce à un système de localisation en temps réel, ce qui permet à l’équipe de sauvetage de communiquer avec les victimes enfouies sous les décombres. Le prototype de robot est accompagné d’un boîtier contenant l’alimentation électrique, d’un PC de qualité industrielle et des dispositifs de communication nécessaires. Le boîtier est relié au robot par un câble d’alimentation et de communication.
Capteurs tous azimuts
Le RobotRadar est un système radar miniaturisé et est l’un des nombreux capteurs intégrés dans le robot-serpent. Le robot peut se glisser sous les décombres et se rapprocher des victimes prises au piège, augmentant ainsi les chances de trouver des humains enfouis profondément sous les décombres et de sauver le plus de vies possible. Autre outil similaire, le système terrestre de détection sismique permet de détecter et de localiser les bruits de cognements émis par les victimes piégées sous des montagnes de débris.
Outils d’aide à la décision et de visualisation
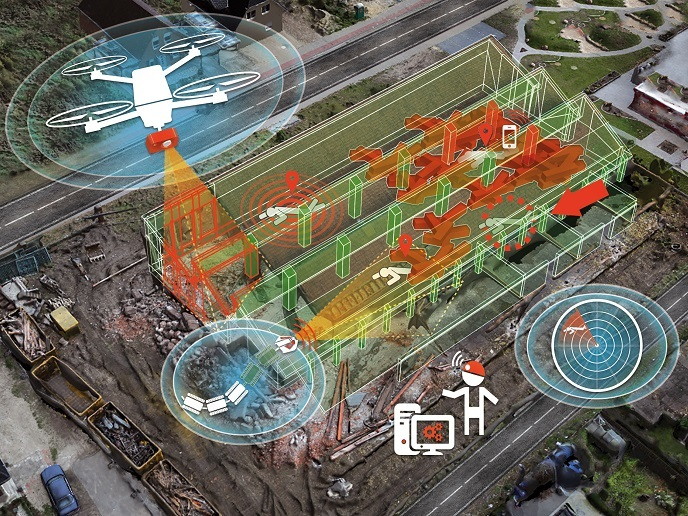
Les outils de modélisation INACHUS aident les équipes d’urgence à comprendre et à évaluer l’intégrité des structures effondrées afin qu’elles puissent planifier leurs interventions en conséquence. Les données de modélisation sont complétées par des services aériens: l’équipement aéroporté, comme les systèmes (petits et grands) embarqués par les véhicules aériens sans pilote, recueille des données visuelles, thermiques et laser qui sont représentées sous la forme de nuages de points. Ces données offrent aux équipes de RSMU un riche ensemble d’informations sur les débris, les ouvertures ou les endroits dangereux.
Imagerie opérationnelle commune
Toutes les données précédemment recueillies sont transmises à la plateforme d’imagerie opérationnelle commune au moyen d’un système de communication ad hoc et résilient qui fournit une vue cartographique complète du site d’un incident. Ses grandes capacités de visualisation 3D devraient accroître l’appréciation générale de la situation et aider les équipes de sauvetage à prendre une décision, qu’elle soit stratégique, tactique ou opérationnelle.
Mots‑clés
INACHUS, recherche et sauvetage, opérations sur site, gestion des crises, réaction en cas de catastrophe, services d’intervention immédiate, robotique, communications d’urgence, imagerie opérationnelle commune, capteurs, évaluation structurelle, télédétection



