

I robot intelligenti possono imparare a riciclare hardware pericoloso
I rifiuti elettronici rappresentano il flusso di rifiuti dal tasso di crescita più elevato nell’UE, ma le quantità riciclate sono inferiori al 40 %. Smontare smartphone, computer e altri gadget domestici è un lavoro complicato e potenzialmente pericoloso per gli esseri umani. Molti di questi dispositivi sono stati costruiti con l’assistenza della robotica avanzata. Queste macchine potrebbero contribuire anche al loro smaltimento? I robot sono generalmente programmati per eseguire compiti all’interno di una gamma limitata e ripetitiva. Il progetto IMAGINE (Robots Understanding Their Actions by Imagining Their Effects), finanziato dall’UE, ha sviluppato un sistema intelligente per consentire a un robot di «comprendere» come smontare un dispositivo mai incontrato in precedenza. Anche un piccolo dispositivo può avere centinaia di viti, il cui smontaggio manuale può rappresentare un compito arduo. «Di conseguenza, ogni volta che si presentano queste costose procedure di riciclaggio, in pratica il riciclaggio non avviene», spiega il coordinatore del progetto Justus Piater, responsabile del Digital Science Center presso l’Università di Innsbruck, in Austria. «Invece, si può ricorrere a uno smaltimento che rappresenta un rischio per la salute e l’ambiente», aggiunge. Il progetto quadriennale innalza le capacità di un robot migliorando l’adattabilità, la percezione e l’autonomia decisionale combinando l’apprendimento automatico con simulazioni basate sulla fisica di ciò che il robot potrebbe trovare in un dispositivo. «La nostra più grande conquista è l’aspetto altamente integrativo del sistema che permette di smontare parzialmente o completamente oggetti che non ha mai visto prima, in un modo che non avrebbe potuto essere pianificato o programmato da zero perché le informazioni semplicemente non erano presenti», afferma Piater.
Sistema intelligente
Piater spiega che una delle principali novità è che il sistema può attivare una simulazione fisica per prevedere l’utilità di determinate azioni. «Riuscire a fare una previsione in anticipo permette di raccogliere esperienza e statistiche che descrivono l’utilità di tali azioni in modo che, la volta successiva, sia possibile prendere una decisione migliore. Il sistema impara da questo.» La simulazione basata sulla fisica genera e visualizza gli oggetti e la loro interazione con l’ambiente. Le immagini della telecamera di un dispositivo vengono analizzate per rilevare opportunità di azione, le cosiddette «affordance», fra cui svitare, fare leva, spingere via e ruotare, agitare e così via. Le capacità percettive, quali rilevare o riconoscere oggetti o stimare la posizione e l’orientamento delle parti, sono state migliorate dal team di IMAGINE. I ricercatori hanno inoltre sviluppato nuovi sistemi di rilevamento di teste di viti, rilevatori di affordance specifiche e rilevatori per il cablaggio all’interno di dispositivi elettronici. «Disponiamo di capacità percettive all’avanguardia, in particolare di percezione visiva, e abbiamo sviluppato nuove funzionalità specifiche», osserva Piater.
Progettazione innovativa
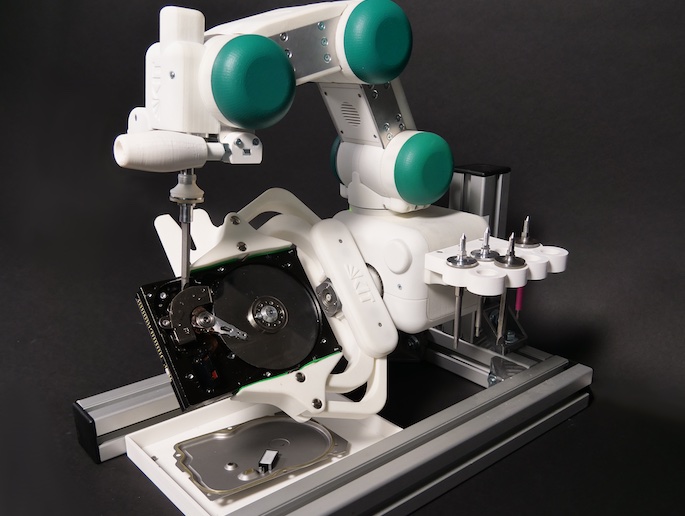
In termini di pianificazione, Plater afferma: «È stato sviluppato uno speciale sistema di pianificazione per decidere quale azione intraprendere, non solo scegliendo una delle affordance su cui agire, ma anche guardando al futuro ed elaborando quanto più possibile un piano.» Tutto questo può essere basato su un’interazione simulata e reale. I pianificatori esistenti sono formulati matematicamente per costruire un piano completo o nessun piano. «Se non riescono a raggiungere l’obiettivo non hanno modo di capire se un’azione sarebbe utile o meno, mentre il pianificatore sviluppato dal gruppo di IMAGINE sa come fare progressi anche se non può produrre un piano completo, proprio come farebbero gli umani», conclude. Una sofisticata pinza robotica multifunzionale con cambio utensile integrato è stata progettata appositamente per lo smontaggio di piccoli dispositivi elettronici. Il sistema dimostrativo è stato addestrato per smontare i dischi rigidi dei computer e può anche gestire alcuni tipi di unità di elaborazione grafica. «Abbiamo lasciato che il robot eseguisse l’intera operazione più volte, analizzando lo stato prima e dopo, e che imparasse da quell’esperienza», aggiunge Piater.
Parole chiave
IMAGINE, robot, riciclaggio, hardware pericoloso, rifiuti elettronici, ambiente, apprendimento automatico, simulazione, dischi rigidi, elettronica



