Mani morbide aiutano a risolvere un problema difficile nella robotica

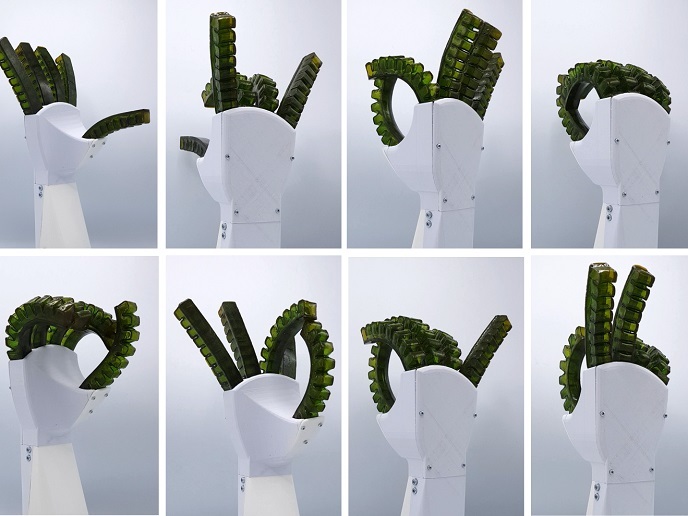
I robot di fabbrica sono in grado di scegliere e posizionare facilmente oggetti regolari che vengono presentati loro in modo ordinato. Tuttavia, afferrare e manipolare oggetti irregolari, come parti disordinate in contenitori, cibo crudo e raccolta differenziata, si è rivelato un problema difficile da risolvere. Il progetto SoftHandler, finanziato dall’UE, ha cercato di costruire un prototipo di un sistema industriale commercialmente valido che funzioni con manipolatori flessibili in grado di conformarsi a oggetti di dimensioni, forma, peso e resistenza differenti. «La nostra idea era di dimostrare se fosse possibile far sfruttare a una pinza industriale l’idea della morbidezza per eseguire operazioni in un ambiente industriale, in particolare nel caso in cui sia necessario prelevare e spostare oggetti posizionati a caso su un vassoio e collocarli all’interno di un’altra scatola o contenitore. Questa esigenza è molto frequente a livello di produzione e nei magazzini», afferma il coordinatore del progetto, Antonio Bicchi.
Complessità riducibile
Il progetto nasce da un precedente lavoro svolto da Bicchi e dal suo team. «Nell’ambito della sovvenzione originale, SOFT HANDS, l’idea era di affrontare un problema nella progettazione delle mani artificiali», spiega. Questo lavoro si è concentrato sulla risoluzione di un difficile problema nelle protesi e nei manipolatori robotici: come imitare la complessità e l’abilità di una mano umana, che ha 19 gradi di libertà, mantenendo al contempo la parte robusta e semplice da usare. «Per molti anni, le persone nella comunità hanno cercato di progettare mani che fossero in grado di avvicinarsi alle capacità di una mano umana», afferma Bicchi. «Tuttavia, erano pochissime le mani artificiali utilizzate nel mondo reale, sia in applicazioni industriali che in protesi». Negli ambienti industriali, i manipolatori altamente articolati devono essere riprogrammati per ogni nuova applicazione, in base all’oggetto con cui interagiranno. Bicchi sostiene che si tratta di un processo costoso che impedisce un’adozione più ampia di questi manipolatori. Parte della soluzione di Bicchi prevedeva di concentrarsi sulle primitive del movimento: gruppi di muscoli che lavorano di concerto, producendo un’azione complessa attraverso semplici impulsi. «Se si utilizzano queste primitive, è possibile eseguire il 90 % delle operazioni di presa con solo uno o due comandi», osserva Bicchi.
Più morbido, migliore, più veloce, più forte
Pertanto, Bicchi e i suoi colleghi dell’Istituto Italiano di Tecnologia hanno cercato di sfruttare questo successo con manipolatori morbidi. «Il corpo umano è conforme, ovvero prende in parte la forma dell’ambiente», spiega Bicchi. Il sistema sviluppato dal team costruisce modelli degli oggetti da afferrare, che vengono confrontati con l’oggetto così come viene percepito dal manipolatore. Più il modello è diverso dalla realtà, più salda sarà la presa del manipolatore sull’oggetto. Ciò migliora i sistemi esistenti che utilizzano la visione artificiale per classificare gli oggetti, poiché questi lottano in condizioni di illuminazione non ottimali e con oggetti eterogenei. I manipolatori morbidi sono inoltre più robusti delle pinze meccaniche complesse. «Abbiamo dimostrato che è possibile manipolare gli oggetti molto più velocemente con il nostro metodo», afferma Bicchi. Il lavoro è stato sostenuto dal Consiglio europeo della ricerca. «Ciò è stato assolutamente cruciale e mi ha dato la libertà di avventurarmi in una nuova direzione, molto diversa da ciò che stavano facendo la maggior parte degli altri gruppi e da ciò che avevamo fatto per 20 anni», aggiunge Bicchi. Da allora il lavoro è stato trasformato in un’azienda commerciale, qbrobotics, che si propone di produrre mani per robot industriali sulla base di questi principi e progetti.
Parole chiave
SoftHandler, mano morbida, manipolatore, robotica, industriale, primitive, gradi di libertà