

Des outils de réalité virtuelle et augmentée pour des processus d’assemblage d’avions plus rapides et plus rentables
Il s’avère extrêmement difficile de planifier les tâches d’assemblage de composants intérieurs où les humains et les robots collaborent dans un environnement complexe et restreint. De nombreux facteurs doivent être analysés, notamment la perception des différents types de travailleurs, la logistique et les situations inattendues comme le dysfonctionnement d’un robot. Les nouvelles technologies telles que la RV permettent de relever ces défis de manière sûre et rentable. La réalité augmentée (RA) permet d’inclure des informations pertinentes obtenues à partir de sources informatiques, comme l’état du robot ou de nouveaux plans d’assemblage dans leur contexte réel et approprié.
Améliorer les procédures opérationnelles grâce à un environnement de simulation basé sur la RV et la RA
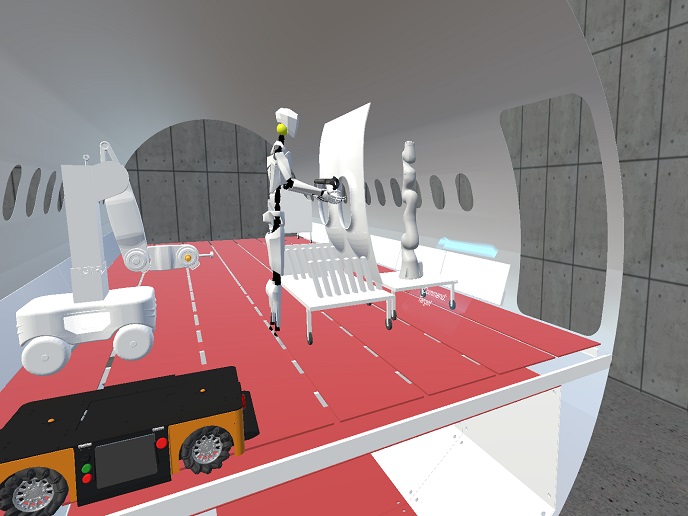
Le projet SIMFAL, financé par l’UE, a optimisé les tâches automatisées pour l’assemblage des pièces intérieures de la cabine et de la soute. Pour y parvenir, il a analysé la façon dont les travailleurs coexistent avec le système automatisé lorsqu’ils effectuent des tâches d’assemblage. «Cette coexistence facilite les configurations de travail où les travailleurs collaborent avec des systèmes automatiques», fait remarquer le coordinateur Diego Borro. Les partenaires du projet ont mis en place un environnement de simulation basé sur la RV et la RA pour afficher et évaluer des scénarios de processus alternatifs. Ils ont développé un environnement de RV pour simuler l’assemblage de l’intérieur d’un avion. Les résultats ont été intégrés au sein d’un système de RA. Cet outil est utilisé pour aider les travailleurs pendant le processus d’assemblage, en permettant de visualiser et/ou contrôler les données réelles en direct. Ensemble, ces deux outils évaluent différentes alternatives d’assemblage, et choisissent la meilleure en termes de productivité et en matière de santé et de sécurité des travailleurs. «Ce simulateur RV interactif, flexible et puissant génère différents scénarios alternatifs pour une procédure d’assemblage donnée en modifiant, entre autres, le niveau d’automatisation, la collaboration homme-robot et le nombre de robots», explique Diego Borro. «Par ailleurs, le simulateur RV constitue une plateforme très robuste pour essayer, évaluer et prendre des décisions concernant les processus.»
Aider les constructeurs aéronautiques à planifier et à évaluer les alternatives en matière d’assemblage
Une analyse peut être effectuée pour évaluer les alternatives en matière d’assemblage, avec différents indicateurs de performance clés comme les délais, les coûts, l’ergonomie, les investissements et le retour sur investissement. Au total, 23 scénarios de base et 81 scénarios aéronautiques complets ont été simulés et évalués. L’équipe SIMFAL a également mis au point un démonstrateur de jumeau numérique afin de vérifier les processus réels. Cela a été possible grâce à une architecture de communication robuste conçue pour les communications entre les robots réels du processus et les robots virtuels du démonstrateur. Le démonstrateur permet aux utilisateurs de visualiser virtuellement chaque robot ainsi que les mouvements de ses éléments. «À l’avenir, ce démonstrateur sera non seulement utilisé pour surveiller le processus, mais aussi pour contrôler ou modifier les paramètres du processus en temps réel», commente Diego Borro. Un outil de RA a également été intégré dans le démonstrateur de jumeau numérique afin que le système puisse guider les travailleurs au cours des tâches collaboratives homme-robot. «SIMFAL a développé et évalué différentes approches de répartition de la charge de travail entre les humains et les machines, et a trouvé la solution optimale sur le plan de la productivité», conclut Diego Borro. Il est désormais possible d’adapter un système automatisé à un travailleur donné, en tenant compte de facteurs supplémentaires tels que l’ergonomie et la satisfaction du travailleur.
Mots‑clés
SIMFAL, assemblage, robot, RV, avion, RA, cabine, cargaison, collaboration homme-robot