Wenn Roboter Schnurrhaare haben
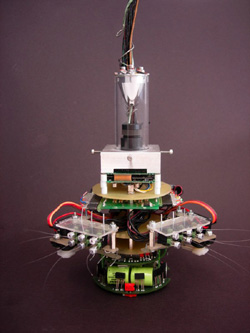
Die haptische Wahrnehmung von Mäusen und Ratten mit ihren Schnurrhaaren ist beinahe so gut wie der menschliche Tastsinn an den Fingerspitzen. Angesichts der mehreren Tausend Tastrezeptoren an den Fingerspitzen ist es faszinierend, dass nur etwa 30 Schnurrhaare auf jeder Seite des Gesichts eines Nagetiers es diesen ermöglichen, sich in komplexen Umgebungen in der Dunkelheit zu bewegen. Diese einzigartige Fähigkeit von Schnurrhaaren, als vielseitige Tastsensoren zu fungieren, die nur minimalen Kontakt mit Objekten erfordern und lichtunabhängig sind, weckte die Aufmerksamkeit der AMOUSE-Partner. Zur Erforschung einer geeigneten Morphologie für ein Array künstlicher Schnurrhaarsensoren seitlich an einem sich bewegenden Roboter haben Ingenieure, Biologen und Neurobiologen zusammengearbeitet. Die "künstliche Maus" verfügt über 12 künstliche Schnurrhaare sowie eine Kamera und dient als biomimetisches Modell zur Untersuchung der Verarbeitung haptischer Informationen durch Nagetiere. Weiterhin kann das Zusammenwirken zwischen unterschiedlichen Sensorsystemen wie visuellen und somatosensorischen Sensoren untersucht werden. Genauer gesagt wurden Antworten auf Fragen zu Auswirkungen der Morphologie des Schnurrhaar-Arrays auf die Fähigkeit der "künstlichen Maus" gesucht, sich hinderungsfrei durch ein Testfeld zu bewegen. Das Vermeiden von Zusammenstößen ist von größter Bedeutung für mobile Roboter. Bisher wurde dies mithilfe optischer Sensoren erreicht, die jedoch auf eine beleuchtete Umgebung angewiesen waren und zudem eine rechenintensive Bildverarbeitung voraussetzten. Das Schätzen von Entfernungen und Erkennen der Form von Objekten mit einem mechanischen Fühler war die Herausforderung für die Projektpartner am Max-Planck-Institut für psychologische Forschung. Reflektionswinkel und Signalgeschwindigkeit der künstlichen Schnurrhaare stellten die grundlegenden Informationen zur Position des Zielobjektes sowie für die Formerkennung dar. Das Messen der Kontaktabstände mit unterschiedlichen Protraktionswinkeln ermöglicht eine Unterscheidung zwischen runden Objekten mit variierendem Radius und ebenen Würfeln oder Zylindern. Auch wenn die Form scharfer Objekte mit einer glatten Oberfläche mit einem einzigen Schnurrhaar erkannt werden kann, liefern zwei oder mehr senkrecht zueinander angeordnete Schnurrhaare eine verbesserte Sensorleistung. Unter Umständen noch wichtiger sind die neuen Erkenntnisse, die Wissenschaftler beim Verständnis der Formerkennung von Nagetieren mithilfe ihrer Schnurrhaare unterstützen können.