When robots will have whiskers
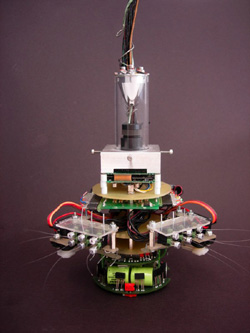
The tactile perception that mice and rats have with their whiskers is almost as good as the perception of humans with their fingertips. Considering the thousands of tactile receptors on fingertips, it is amazing that only about 30 whiskers on each side of a rodent face allows them to move in complex environments and darkness. This unique potential of whiskers as versatile touch sensors that necessitate minimum contact with objects and function independently of light was the factor that drew the attention of the AMOUSE project partners. To investigate the suitable morphology of arrays of artificial whisker sensors mounted on the sides of a moving robot, engineers worked in collaboration with biologists and neuroscientists. the 'artificial mouse' was equipped with 12 artificial whiskers and a camera to serve as a biomimetic model for studying how rodents process tactile sensory information. Furthermore, the interplay between different sensory systems - visual and somatosensory - could be investigated. more specifically, questions about the importance of the whisker arrays' morphology on the ability of the 'artificial mouse' to move through an experimental arena without being obstructed were addressed. Avoiding collisions is of paramount importance for mobile robots. In the past, it had been implemented with optical sensors that depended, however, on an illuminated environment and moreover, involved computationally expensive image processing. estimating distances and recognising the shape of objects encountered with a mechanical probe was the challenge undertaken by project partners at the Max-Planck Institute for Psychological Research. The deflection angle or velocity signals of the artificial whiskers provided the essential information about the location of the target object and formed the basis for its shape recognition. Measuring contact distances at varying protraction angles allowed discrimination between round objects with a varying curve and even cubes or cylinders. while the shape of objects with a smooth surface could be identified with a single whisker, two or more whiskers arranged vertically to each other provided more advanced sensory capabilities. More important, perhaps, are the new clues offered to scientists that could help them understand how rodents recognise shapes using their whiskers.