Des robots sophistiqués
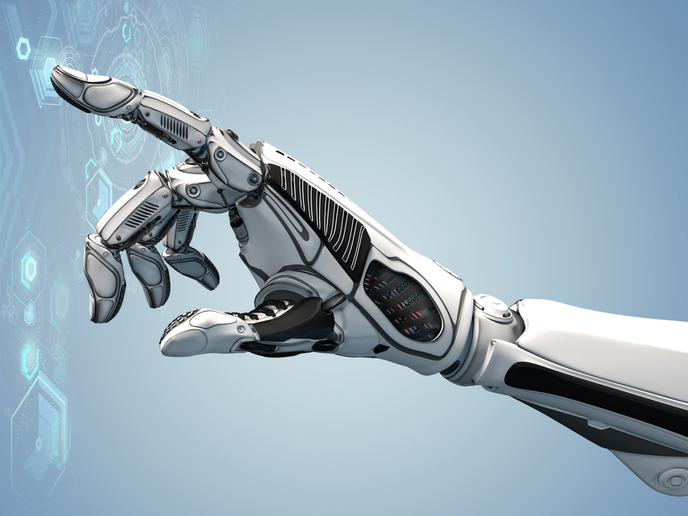
Notre main compte vingt-neuf articulations majeures, qui permettent tous les mouvements complexes nécessaires à nos tâches de tous les jours. Il semble quasiment impossible de bâtir un système capable des mêmes mouvements et fonctions. La main robotisée, dont les éléments sont associés par des ressorts, simule seize de ces articulations. Elle peut adapter sa position pour que les doigts puissent saisir un objet. Avec davantage de développements, un tel dispositif pourrait servir à diverses tâches, qui seraient alors effectuées par des robots au lieu de l'être par des hommes. Le projet ADAPT s'occupait de développer une forme de représentation artificielle que nous décrivons comme la «présence». Il a exploré les relations entre le corps humain et son environnement, en étudiant comment cette compréhension découle des sens et des expériences passées. Pour démontrer ces relations, le projet a étudié d'autres mécanismes appliqués par le cerveau. Les résultats ont été atteints grâce à des expériences pour caractériser la «présence» lors de son développement chez l'enfant, et le projet a également étudié comment les systèmes artificiels pouvaient servir de modèles pour tester les théories de représentation de la perception des actions.