Humans and robots working safely hand in hand

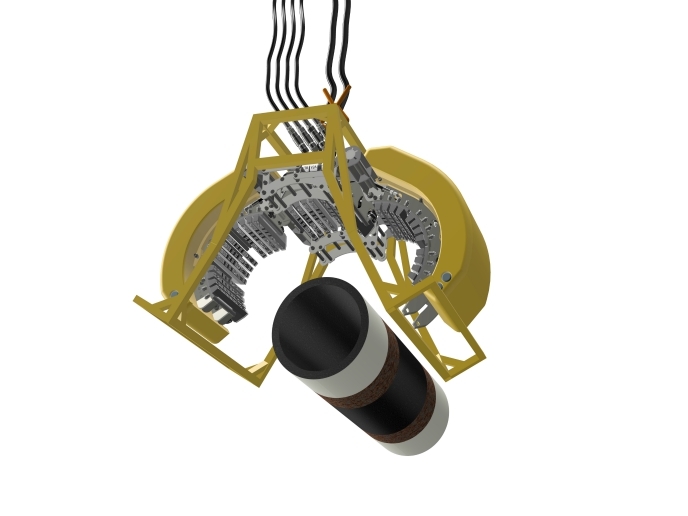
Robots have been transforming the way humans interact with and benefit from technology, helping industries automate processes and boost productivity. However, most robots are limited in terms of what they can do as each movement is highly engineered, and thus, prone to error with a small change in the environment. In addition, their rigid programming mechanisms are making them unfit for dealing with soft objects, and lastly, they can prove dangerous due to their focus on efficiency and speed. Increased functional safety in human-robot collaboration will take current production systems a step closer to being more flexible and efficient. Within the EU-funded project FourByThree, researchers successfully developed a new generation of modular industrial robotic solutions that are suitable for safe and efficient task execution in collaboration with humans. Furthermore, these robots are easy to use and programmable by factory workers. Safe interaction between humans and robots The project acronym FourByThree revolves around four main characteristics of collaborative operation (modularity, safety, usability, and efficiency) and three main actors (humans, robots, and environment) in the manufacturing scenarios. “FourByThree responds to the demand that robots used in industry do not only provide a high degree of dexterity, accuracy and efficiency, but are also able to ensure safety when collaboration between operator and robot is required, even when the workspace is shared,” says project coordinator Iñaki Maurtua. Thanks to the development of innovative hardware and software for collaborative robots, the solutions proposed by the project are modular, safe and efficient. Smart actuators for safe robots Project partners successfully developed actuators that enable safe robotic behaviour in cooperation with humans when integrated into robotic arms. The drives are based on a novel spring design. Its use increases the inherent safety of the actuator in human-robot applications by absorbing shocks and reducing the contact transient forces. The springs also allow an additional deflection in case of collision. Partners developed four different sizes of actuators, allowing the integrator to freely select the number and size of each drive, depending on the robot arm's requirements. Projection-based workspace monitoring Researchers developed a projection- and vision-based proximity monitoring system that is modular, robust and suitable for industrial use. The newly developed workspace monitoring system projects safety areas around the moving robot, dynamically adjusting size and shape according to the robot’s movement. “Its basic function is to oversee robot movements and stop it should a person or an object enter into the defined safety zones,” explains Maurtua. This technology enables intuitive human-robot collaboration by projecting to the user relevant information directly into the workspace and generating virtual buttons that allow intuitive control of the robot by humans. FourByThree's hardware and software solutions have been tested in four pilot scenarios focused on industrial processes such as riveting of aircraft parts, welding on sheet metals, mould assembly and wax deburring. Furthermore, most of the components developed can be used with commercial-off-the-shelf robotic arms. FourByThree's robotic hardware and software solutions could find wide applicability in many industrial sectors, especially in areas where minimising human exposure to occupational hazards are key considerations. These solutions are now available through an online platform. In this online shop, visitors can find more information about most of the components developed, some of which are open-source software.
Keywords
FourByThree, robots, safety, actuators, human-robot collaboration, robotic arms, workspace monitoring